Welcome to XBotBlock’s documentation!
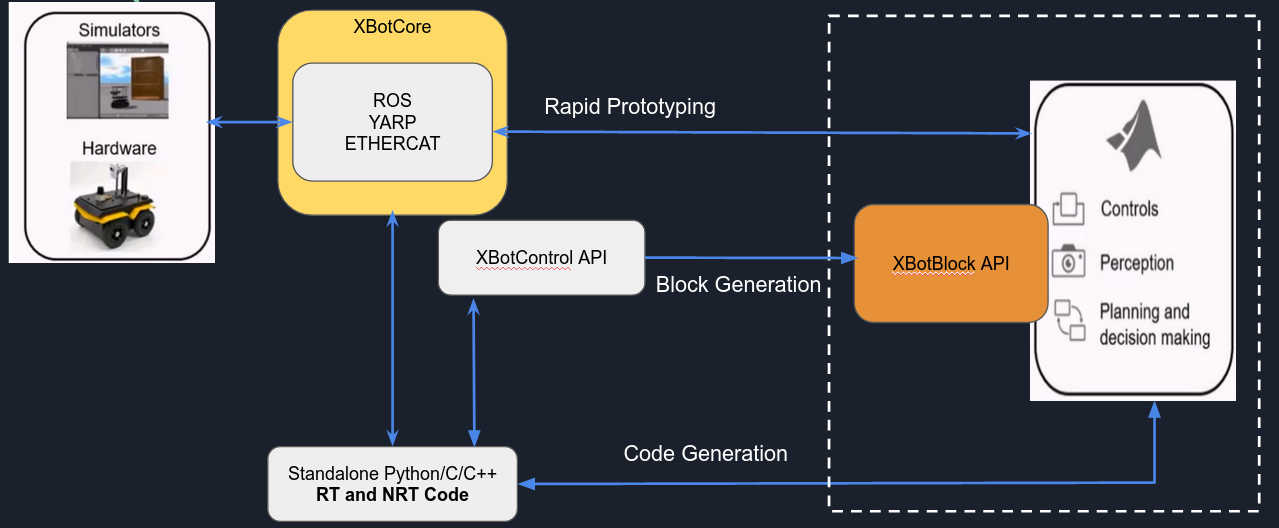
XBotBlock, Block Language for XBotControl, is a framework where is possible to use XBotControl APIs that control any kind of robots using the block language in different enviroments such as Matlab and Simulink:
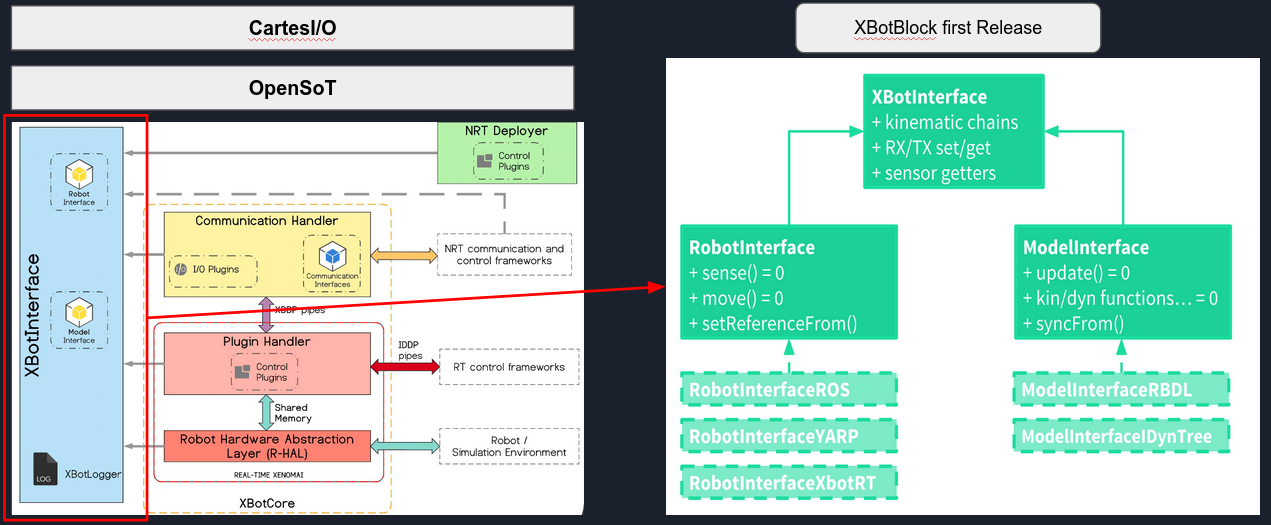
It works with an internal library called blockfactory that allows to transform C++ code into Simulink, S-Function block where it is possible to use automotive and aerospace concepts like rapid prototyping, model-in-the-loop (MIL), process-in-the-loop (PIL) and hardware-in-the-loop (HIL) using tools of code generation (Embedded Coder), creating ROS nodes (ROS Toolbox) that it’s NON-Real Time Code and Real time code exploiting the Real Time plugins skeleton of XBotCore framework.
Contents: