Background
XBotInterface
XBot::Joint
The most atomic component is XBot::Joint, which collects all joint states and commands, and provides the corresponding getters and setters. Joints are organized into kinematic chains, which are implemented by the XBot::KinematicChain class.
XBot::KinematicChain
Each kinematic chain of the robot (as described by the SRDF file) is parsed into an object of this class. It stores internally the vector of joints belonging to the chain, and provides chain-wise getters and setters for the robot state, so that is easy for the user to command or read a single chain of the robot. Moreover, the KinematicChain provides the ability of getting sensors attached to it. The set of all kinematic chains is organized into the main object of the library, the XBot::XBotInterface.
XBot::XBotInterface
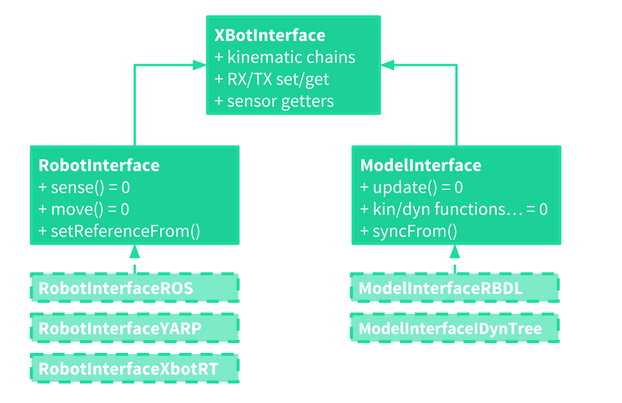
XBotInterface provides a view of the robot as a set of kinematic chains. Internally, it stores the vector of all chains that make up the robot. It provides robot-wise getters and setters for the robot state, and for all sensors attached to it.
XBot::RobotInterface
The XBot::XBotInterface library acts as a simple, organized container for the robot state. The XBot::RobotInterface inherits from such a class, and adds a few method that allow for communication from/to a robot:
sense() acquires data from the robot sensors.
move() sends commands to the robot actuators.
Depending on the actual implementation of the RobotInterface being used, these methods will perform different operations, e.g.
reading/publishing to suitable ROS topics
reading/writing to suitable YARP ports.
reading/writing to suitable OROCOS ports.
reading/writing directly from the robot hardware abstraction layer as in the case of the XBotRT implementation.
XBot::ModelInterface
XBot::ModelInterface adds to XBot::XBotInterface methods for computing kinematics/dynamics quantities corresponding to the robot state described by the underlying XBotInterface object. These include:
forward kinematics (link pose, orientation, twists, jacobians, jdotqdot terms, centre-of-mass, centroidal momentum and centroidal momentum matrix, …).
inverse dynamics (gravity compensation torques, inertia matrix, …).
forward dynamics.
…
Before computing any of these quantities, an update() method must be called. T his has the effect of updating the underlying back-end with the joint states stored inside the XBot::ModelInterface.
Moreover, since robot and model objects derive from a common base class, it is very simple to exchange information between them. More specifically:
a model can be synchronized to the actual state of the robot by calling a syncFrom() method on the model, and providing the robot as argument.
a model state can be used as desired state for the robot, by calling a setReferenceFrom() method on the robot and providing a model as argument. Both these methods work also in the case that the model only represents a subset of the robot kinematic tree (e.g. just the upperbody of a humanoid robot).
The ModelInterface uses external library to compute kinematics/dynamics quantities such as RBDL.
Floating Base Robot
Some of the most interesting dynamical systems come from the borderline science fiction robots that walk around on two or four legs. These robots are what we call floating-based robots. The base isn’t bolted to the floor. It instead floats above the ground and moves from place to place with the robot. At any moment in time, the robot must choose carefully torques to apply that will induce the perfect reaction forces from the environment at its points of contact so that those reaction forces correctly manipulate its free floating base.
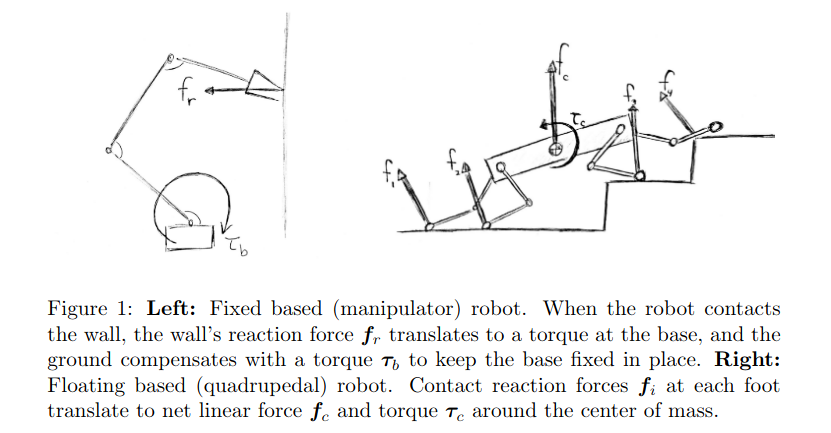
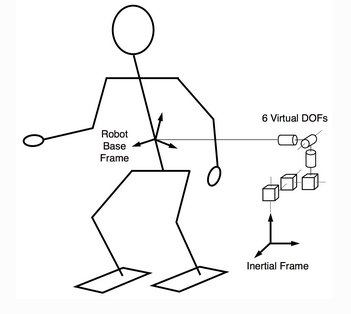
We also now have an underactuated system. Since the base of the robot is free to move around, we can no longer fully control all degrees of freedom. We often choose the floating-base of the robot to be situated somewhere around the robot’s torso near the robot’s center of mass. These floating base dimensions consist of three positional coordinates and three rotational components totaling a full six degrees of freedom that we can’t directly control. The robot doesn’t have a collection of jet engines attached to its torso that can directly induce forces and torques on the floating base. All forces and torques on that base must be generated by some contact with the environment. Physically this means that in order to fully control these unactuated degrees of freedom, the robot needs to reason about how it can generate the requisite reaction forces from the environment around it:
XBotInterface API’s Translated
XBotInterface
Method |
Input |
Output |
|---|---|---|
getEnabledJointId |
NONE |
int Vector of joints enabled |
getJointPosition |
NONE |
double Vector of joints position |
getMotorPosition |
NONE |
double Vector of motors position |
getJointVelocity |
NONE |
double Vector of joints velocity |
getMotorVelocity |
NONE |
double Vector of motors velocity |
getJointAcceleration |
NONE |
double Vector of joints acceleration |
getJointEffort |
NONE |
double Vector of joints torque |
getTemperature |
NONE |
double Vector of joints temperature |
getStiffness |
NONE |
double Vector of joints stiffnes |
getDamping |
NONE |
double Vector of joints damping |
getPositionReference |
NONE |
double Vector of joints position reference |
getVelocityReference |
NONE |
double Vector of joints velocity reference |
getEffortReference |
NONE |
double Vector of joints torque reference |
setPositionReference |
double Vector of joints position reference |
NONE |
setJointPosition |
double Vector of joints position reference |
NONE |
setMotorPosition |
double Vector of motors position reference |
NONE |
setVelocityReference |
double Vector of joints velocity reference |
NONE |
setJointVelocity |
double Vector of joints velocity reference |
NONE |
setMotorVelocity |
double Vector of motors velocity reference |
NONE |
setJointAcceleration |
double Vector of joints acceleration reference |
NONE |
setEffortReference |
double Vector of joints torque reference |
NONE |
setJointEffort |
double Vector of joints torque reference |
NONE |
setTemperature |
double Vector of joints temperature reference |
NONE |
setStiffness |
double Vector of joints stiffness reference |
NONE |
setDamping |
double Vector of joints damping reference |
NONE |
enforceJointLimits |
double Vector of joints position reference |
NONE |
enforceVelocityLimit |
double Vector of joints velocity reference |
NONE |
enforceEffortLimit |
double Vector of joints torque reference |
NONE |
getJointLimits |
NONE |
double Vectors of mechanical position limits |
getVelocityLimits |
NONE |
double Vector of mechanical velocity limits |
getEffortLimits |
NONE |
double Vector of mechanical torque limits |
checkJointLimits |
BOOL value if position limits are satisfied |
double Vector of joints position reference |
checkVelocityLimits |
BOOL value if velocity limits are satisfied |
double Vector of joints velocity reference |
checkEffortLimits |
BOOL value if torque limits are satisfied |
double Vector of joints torque reference |
getForceTorque |
NONE |
ForceTorqueSensor::ConstPtr MAP |
getForceTorque |
Force Torque Sensor ID |
ForceTorqueSensor::ConstPtr |
getImu |
NONE |
ImuSensor::ConstPtr MAP |
getImu |
IMU Sensor ID |
ImuSensor::ConstPtr |
RobotInterface
Method |
Input |
Output |
|---|---|---|
sense |
NONE |
BOOL if the sense is successful |
move |
NONE |
BOOL if the move is successful |
setReferenceFrom |
ModelInterface |
BOOL if the synchronization is allowed |
ModelInterface
Method |
Input |
Output |
|---|---|---|
update |
NONE |
BOOL if the update is successful |
syncFrom |
XBotInterface |
BOOL if the synchronization is allowed |
getFloatingBasePose |
NONE |
BOOL if the the model is floating base |
getFloatingBaseTwist |
NONE |
BOOl if the the model is floating base |
setFloatingBasePose |
Homogeneous transformation |
BOOL if the floating_base_pose frame is valid |
setFloatingBaseState |
Homogeneous transformation and Twist vector |
BOOL if the the model is floating base |
setFloatingBaseOrientation |
Rotation matrix |
BOOL if the the model is floating base |
setFloatingBaseTwist |
Twist vector |
BOOL if the the model is floating base |
setFloatingBaseAngularVelocity |
Angulator velocity |
BOOL if the the model is floating base |
getGravity |
NONE |
Gravity vector |
getGravity |
Reference frame |
Gravity vector, BOOL if the reference frame is valid |
setGravity |
Gravity vector |
NONE |
setGravity |
Reference frame, Gravity vector |
BOOL if the reference frame is a valid link name |
getPose |
Source and Target frame |
Homogeneous transformation, BOOL if the source/target frame are valid |
getPose |
Source frame |
Homogeneous transformation, BOOL if the source frame is valid |
getOrientation |
Source and Target frame |
Rotation matrix, BOOL if the source/target frame are valid |
getOrientation |
Source frame |
Rotation matrix, BOOL if the source frame is valid |
getPointPosition |
Source, Target frame and source point vector |
Point vector, BOOL if the source/target frame are valid |
getPointPosition |
Source frame and source point vector |
Point vector, BOOL if the source frame is valid |
getPointAcceleration |
Link Name and point vector |
Acceleration vector, BOOL if the link name is valid |
getCOM |
NONE |
COM Point vector |
getCOM |
Reference frame |
COM Point vector, BOOL if the reference frame is valid |
getCOMVelocity |
NONE |
COM Velocity vector |
getCOMAcceleration |
NONE |
COM Acceleration vector |
getCentroidalMomentum |
NONE |
Centroidal Momentum |
getCentroidalMomentumMatrix |
NONE |
Centroidal Momentum Matrix |
getCentroidalMomentumMatrix |
NONE |
Centroidal Momentum Matrix, The d(CMM)/dt * qdot term |
getVelocityTwist |
Link Name |
Twist velocity vector, BOOL if the link name is valid |
getAccelerationTwist |
Link Name |
Twist acceleration vector, BOOL if the link name is valid |
getRelativeVelocityTwist |
Link and Base Link Name |
Twist velocity vector, BOOL if the link and base link names are valid |
getRelativeAccelerationTwist |
Link and Base Link Name |
Twist acceleration vector, BOOL if the link and base link names are valid |
getJacobian |
Link Name |
Jacobina Matrix, BOOL if the link name is valid |
getJacobian |
Link Name and reference point |
Jacobina Matrix, BOOL if the link name is valid |
getJacobian |
Link Name and Target Frame |
Jacobina Matrix, BOOL if the link name and target frame are valid |
getRelativeJacobian |
Target and Base Link Name |
Jacobina Matrix, BOOL if the target and base link name are valid |
getCOMJacobian |
NONE |
COM Jacobian Matrix |
getCOMJacobian |
NONE |
COM Jacobian Matrix The d(Jcom)/dt * qdot term |
getPosturalJacobian |
NONE |
Postural Jacobian Matrix |
computeJdotQdot |
Link Name and point vector |
Jacobian time derivative by the joint velocity BOOL if link name is valid |
computeRelativeJdotQdot |
Target and Base Link Name |
Jacobian time derivative by the joint velocity BOOL if target and base link name are valid |
getMass |
NONE |
Mass of the robot |
getInertiaMatrix |
NONE |
Inertia matrix |
getInertiaInverse |
NONE |
Inverse Inertia matrix |
computeNonlinearTerm |
NONE |
The non-linear torques vector |
computeGravityCompensation |
NONE |
The gravity compensation torque vector |
computeInverseDynamics |
NONE |
The inverse dynamics torque vector |
computeConstrainedInverseDynamics |
Jacobian and weight vector |
The inverse dynamics torque vector |
ForceTorqueSensor
Method |
Input |
Output |
|---|---|---|
getForce |
NONE |
Force vector |
getToque |
NONE |
Torque vector |
getWrench |
NONE |
Wrench vector |
IMUSensor
Method |
Input |
Output |
|---|---|---|
getOrientation |
NONE |
Orientation matrix |
getOrientation |
NONE |
Quaternion |
getLinearAcceleration |
NONE |
Linear Acceleration vector |
getAngularVelocity |
NONE |
Angular Velocity vector |