Quickstart
Getting started with CartesIO requires only a few setup steps, especially if you start from a URDF/SRDF-based description of your robot. If you don’t, please follow the relevant ROS documentation. Once this is done, you just need to write a single configuration file to specify what Cartesian control problem you actually want to solve.
Setting up the robot description
For the robot description, we leverage on the ROS model, which requires you to write:
a URDF file with kinematic and dynamic properties of the robot
a SRDF file with semantic information attached to it, such as the division of your robot into separate kinematic chains, and the definition of a homing configuration
We pose the additional constraint that floating base robots should have their base link connected
to the world frame through a floating joint type.
Moreover, you should list all kinematic chains which make up the robot into a separate chains group inside
the SRDF. You can always refer to the examples/ subfolder of the CartesIO ROS package,
which is accessed e.g. by typing roscd cartesian_interface/examples
Setting up the problem description
The problem description is a YAML file defining the control problem, i.e.:
which tasks do I want the robot to perform?
in which priority order?
under what constraints?
Please follow this link to understand the basix syntax.
Writing an example launch file
For your commodity, it is better to wrap all the system setup in a single launch file.
<launch>
<param name="robot_description"
textfile="$(find my_urdf_pkg)/my_robot.urdf"/>
<param name="robot_description_semantic"
textfile="$(find my_srdf_pkg)/my_robot.srdf"/>
<param name="cartesian/problem_description"
textfile="$(find my_cartesio_pkg)/my_robot_stack.yaml"/>
<include file="$(find cartesian_interface)/launch/cartesio.launch">
<!-- Control frequency (Hz) -->
<arg name="rate" value="100.0"/>
<!-- Spawn RviZ interacrive markers -->
<arg name="markers" value="true"/>
<!-- Set to false for fixed base -->
<arg name="is_model_floating_base" value="true"/>
</include>
</launch>
You can immediately start controlling your robot by executing this simple launch file!
It is now possible to interact with you Cartesian controller directly to the auto-generated
ROS API (rostopic list, rosservice list), or through our C++/Python Client Library
Get started with the tutorial
For most applications, you will interact with CartesIO through ROS. This can be conveniently done either via raw topics, services, and actions (see this page), or by using a C++/Python clent library. The usage of the Python Client Library is explained with a tutorial that we’ve prepared, which will guide you through the available API.
- To run the tutorial:
install the jupyter notebook (e.g.
pip install notebook, possibly with--userif sudo permissions are not available)open a web browser (e.g. chrome, firefox, …)
roscd cartesian_interface/examples/pythonjupyter notebook ros_client_example.ipynbthe notebook should display inside your browser
The tutorial notebook will look like in the following static document:
And will enable you to easily control the IIT-HHCM Coman robot!
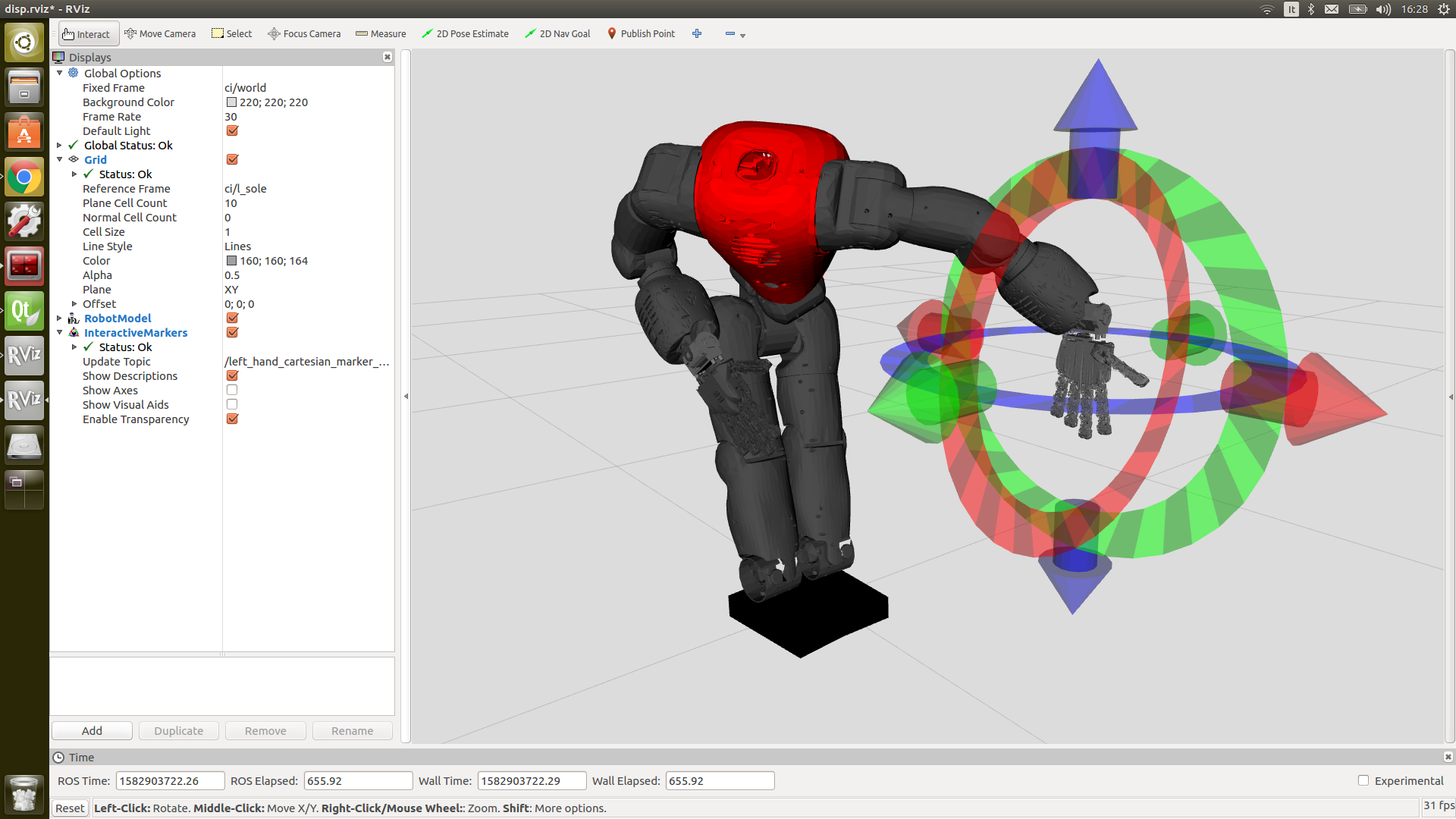
Visualization of the IK solution in Rviz, with interactive markers.