ROS End-Effector Gazebo Plugins
This package is an utility to help end effector dynamic simulation with Gazebo. It is hosted on github here.
Generic Information
It is very similar to the “official” ROS package for control : gazebo_ros_control.
It includes a gazebo plugin to take commands (references) from /ros_end_effector/joint_states topic and use to move the simulated robot in gazebo. This is done with a pid controller. The same plugin also publish the “real” joint states (derived by the gazebo simulation) in the topic /rosee_gazebo_plugins/joint_states.
Take care: In /ros_end_effector/joint_states topic there are states for actuated joints only; while in /rosee_gazebo_plugins/joint_states there are states for ALL non-fixed joints (passive and mimic included). This may change in future, but for now I leave as it is because returning also mimic joints is not so a big problem.
At the moment each joint can be controlled in position or in velocity, using the SetPositionTarget() and SetVelocityTarget() of gazebo. Gains (pid) are settable in a config file (see later for istructions). Please note that for now ROS End-Effector sends only positional references.
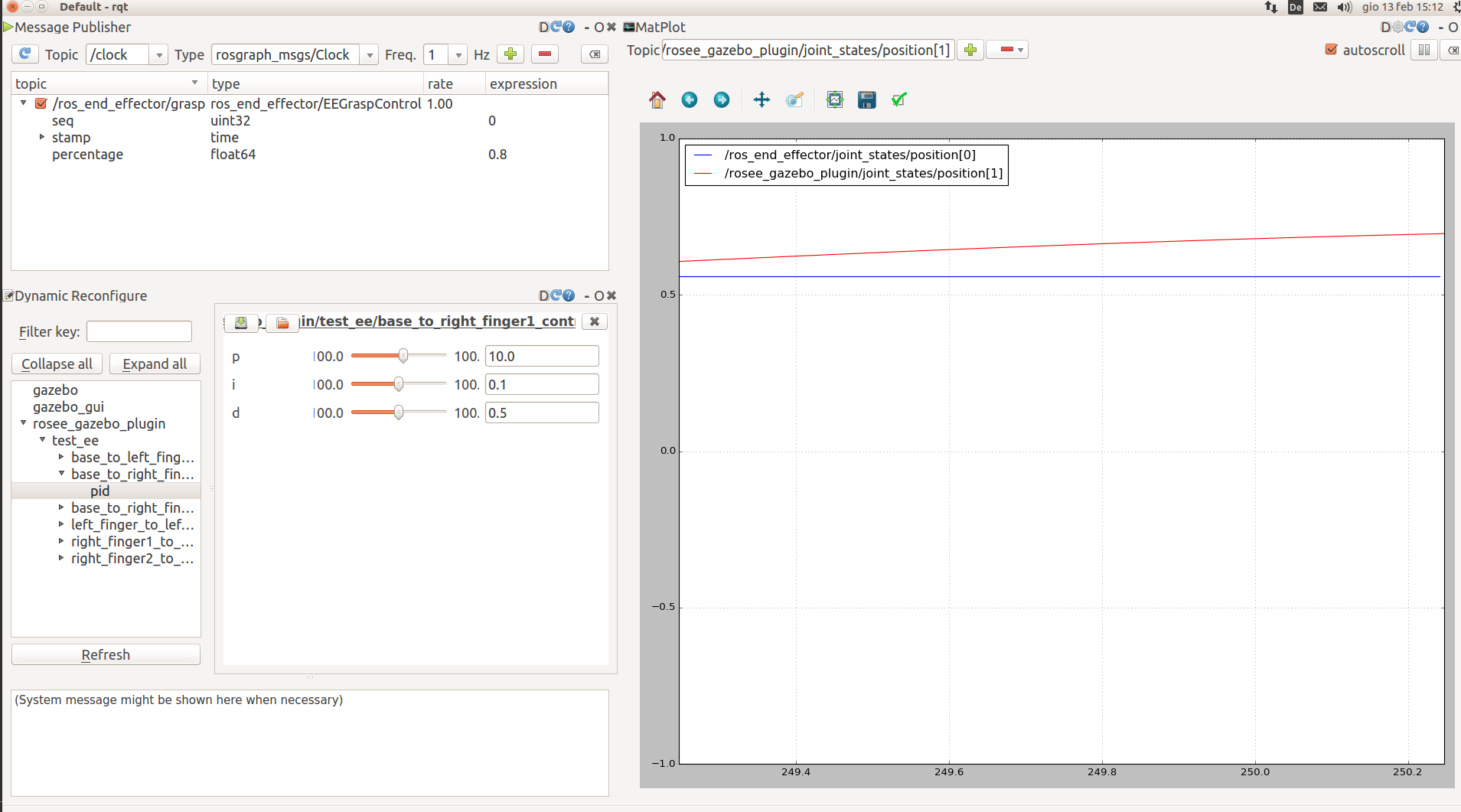
In the package, there is an additional ROS node, DynReconfigure, which uses the ROS tool Dynamic Reconfigure server to give the possibility to change the PID gains during the simulation.
Mimic Joints
Thanks to the mimic_joint_plugin (and to mimic_joint_gazebo_tutorial to understand how to use it), now also mimic joints work correctly. The argument set_pid of this plugin should be set to false, because otherwise a pid controller is used, that is the “default” gazebo one (see plugin page for more info). And also when mimicking, we want to reply exactly the angle of the other joint (or not?). See above how to deal with this plugin if your urdf model has some mimic joint
How to Install
Note
You probably already installed this if you have followed the steps in Install section
git clone https://github.com/roboticsgroup/roboticsgroup_gazebo_plugins.git #necessary external plugin
git clone -b <branch_you_want> https://github.com/ADVRHumanoids/rosee_gazebo_plugins.git
compile with catkin_make
Prepare your Model for Gazebo
You need additional steps on your .urdf file to make Gazebo simulation works.
Be sure to have an urdf file ready for gazebo (info here).
Also add in your .urdf :<gazebo> <plugin name="SOMENAME" filename="librosee_plugin.so"> </plugin> </gazebo>
Add rosee_gazebo_plugins_args node in the main yaml config file your_hand.yaml, that you have created before as instructed in Prepare the files section. In this node you have a controller for each actuated joint, specifing the controller type, the joint which is controlled, and the pid gains. An example is below:
ROSEndEffector: urdf_path: "urdf/my_hand.urdf" srdf_path: "srdf/my_hand.srdf" # ^^^^^^^^^^^^^^^^^^^^^^^^^^^^ -- > you should already have these lines rosee_gazebo_plugins_args: joint_1_controller_name: type: JointPositionController joint_name: JOINT NAME pid: {p: 0.3, i: 0.001, d: 0.00005} joint_2_controller_name: ...
Be sure to put different controller names
Supported controllers type are JointPositionController and JointVelocityController, but for now ROS End-Effector only send position reference (so use JointPositionController for now).
In truth there exists also JointEffortController, we will implement this in future if gazebo will allow it (it is not possible in gazebo 7)The pid gains are settable online thanks to the DynReconfigure node. This exploits a ROS tool called Dynamic reconfigurator server. The node is inside this package
Important: if your urdf file has some mimic joints, you have to add a mimic_joint_plugin for each one, like below:
<joint name="base_to_right_finger" type="revolute"> <axis xyz="0 0 1"/> <limit effort="1000.0" lower="-0.7" upper="0.0" velocity="0.5"/> <parent link="base"/> <child link="right_finger"/> <origin xyz=".1 0 0"/> <mimic joint="base_to_left_finger" multiplier="-1" offset="0"/> </joint> <!-- ^^^^^^^^^^^^^^^^^^^^^^^^^^^^ this is the mimic joint --> <gazebo> <plugin filename="libroboticsgroup_gazebo_mimic_joint_plugin.so" name="base_to_right_finger_jointmimic_joint_plugin"> <joint>base_to_left_finger</joint> <mimicJoint>base_to_right_finger</mimicJoint> <multiplier>-1.0</multiplier> <offset>0</offset> <sensitiveness>0.0</sensitiveness> <!-- if absolute difference between setpoint and process value is below this threshold, do nothing; 0.0 = disable [rad] --> <maxEffort>1000.0</maxEffort> </plugin> </gazebo>
This example is taken from configs/urdf/two_finger_mimic.urdf file.
If you like to use xacro macros to add this plugin, you can create one in this way:<xacro:macro name="mimic_joint_plugin_gazebo" params="name_prefix parent_joint mimic_joint has_pid:=false multiplier:=1.0 offset:=0 sensitiveness:=0.0 max_effort:=1.0 robot_namespace:=''"> <gazebo> <plugin name="${name_prefix}mimic_joint_plugin" filename="libroboticsgroup_gazebo_mimic_joint_plugin.so"> <joint>${parent_joint}</joint> <mimicJoint>${mimic_joint}</mimicJoint> <xacro:if value="${has_pid}"> <!-- if set to true, PID parameters from "/gazebo_ros_control/pid_gains/${mimic_joint}" are loaded --> <hasPID /> </xacro:if> <multiplier>${multiplier}</multiplier> <offset>${offset}</offset> <sensitiveness>${sensitiveness}</sensitiveness> <!-- if absolute difference between setpoint and process value is below this threshold, do nothing; 0.0 = disable [rad] --> <maxEffort>${max_effort}</maxEffort> <!-- only taken into account if has_pid:=true [Nm] --> <xacro:unless value="${robot_namespace == ''}"> <robotNamespace>($robot_namespace)</robotNamespace> </xacro:unless> </plugin> </gazebo> </xacro:macro>
And then use it:
<xacro:mimic_joint_plugin_gazebo name_prefix="base_to_right_finger_joint" arent_joint="base_to_left_finger" mimic_joint="base_to_right_finger" has_pid="false" multiplier="-1.0" max_effort="1000.0" />
This example is taken from configs/urdf/two_finger_mimic.urdf.xacro file.
The macro is taken from mimic_joint_gazebo_tutorial.
How to Run
To run ROS End-Effector as a whole, follow the guide in How to use ROS End-Effector with your End-Effector section.
Anyway, ROS End-Effector Gazebo Plugins is a package that run independently, so you can also launch it alone:
roslaunch rosee_gazebo_plugins twofinger.launch
To run the dynamic reconfigurator:
rosrun rosee_gazebo_plugins DynReconfigure two_finger
Also useful
rqt
And set it to have things like that, for example to tune the gains: